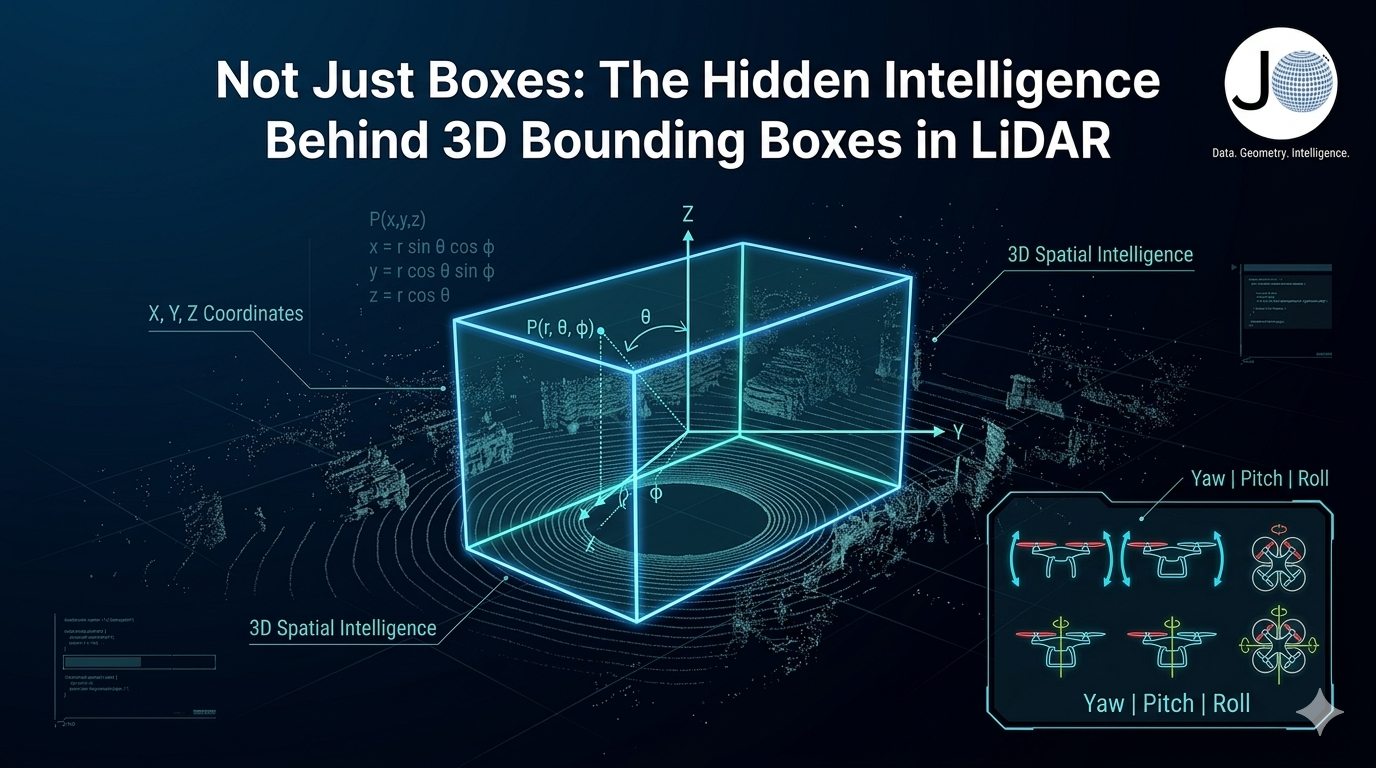
Not Just Boxes: The Hidden Intelligence Behind 3D Bounding Boxes in LiDAR
When people look at LiDAR annotations,
they often see simple boxes floating in space.
But here’s the reality:
A 3D bounding box is not just a box.
It’s a compressed representation of reality.
Every dimension, every angle, every coordinate—
encodes how a machine understands the physical world.
And if you get it wrong, your entire perception system feels it:
Misjudged distances
Incorrect motion prediction
Unstable tracking
It Starts with Dimensions — But It’s Not Just Size
At the core of every cuboid are three numbers:
Length (L) → front to back
Width (W) → side to side
Height (H) → bottom to top
On paper, this looks trivial.
In reality, this is where data quality begins—or breaks.
What Actually happens in the pipeline:
Slight overestimation → objects overlap → IoU drops
Underestimation → missing points → feature loss
Inconsistent sizing across frames → temporal instability
Models implicitly learn:
P(l,w,h∣class)P(l, w, h \mid class)P(l,w,h∣class)
So if your annotations are inconsistent,
your model learns a distorted version of reality.
Good annotation isn’t about fitting a box.
It’s about preserving real-world scale with statistical consistency.
Orientation: Where Most Subtle Errors Hide
Rotation is where annotation becomes true intelligence.
Yaw (Z-axis rotation)
Defines heading direction
Critical for trajectory prediction
Even a small yaw error:
Breaks velocity estimation
Causes incorrect path forecasting
Mathematically:
θ=arctan2(vy,vx)
Pitch & Roll (Y and X axes)
Often ignored—but dangerous to overlook.
Pitch → slopes, ramps, elevation
Roll → tilted vehicles, fallen objects
Edge Cases:
Vehicles on inclined roads
Objects partially mounted on curbs
Off-road or construction environments
Ignoring rotation edge cases = training your model for a “perfect world” that doesn’t exist.
Position: The Anchor of Reality
Every cuboid exists through:
X → lateral displacement
Y → longitudinal distance
Z → vertical height
This is not just geometry—this is how the system perceives space.
Why precision matters:
A small shift in position leads to:
Incorrect depth estimation
Poor object association in tracking
Sensor fusion mismatches
Ground alignment constraint:
z≈zground+h/2
Violation leads to:
Floating objects
Sinking boxes
Broken scene understanding
Position defines spatial truth. Everything else depends on it.
Axis Alignment: The Silent QA Signal
Most annotators overlook this—but it’s critical for data validation pipelines.
is_axis_aligned = true → no rotation
is_axis_aligned = false → rotated object
Why it matters:
This simple flag enables:
Automated QA checks
Rotation anomaly detection
Dataset consistency analysis
At scale, this becomes a powerful signal for identifying systematic errors.
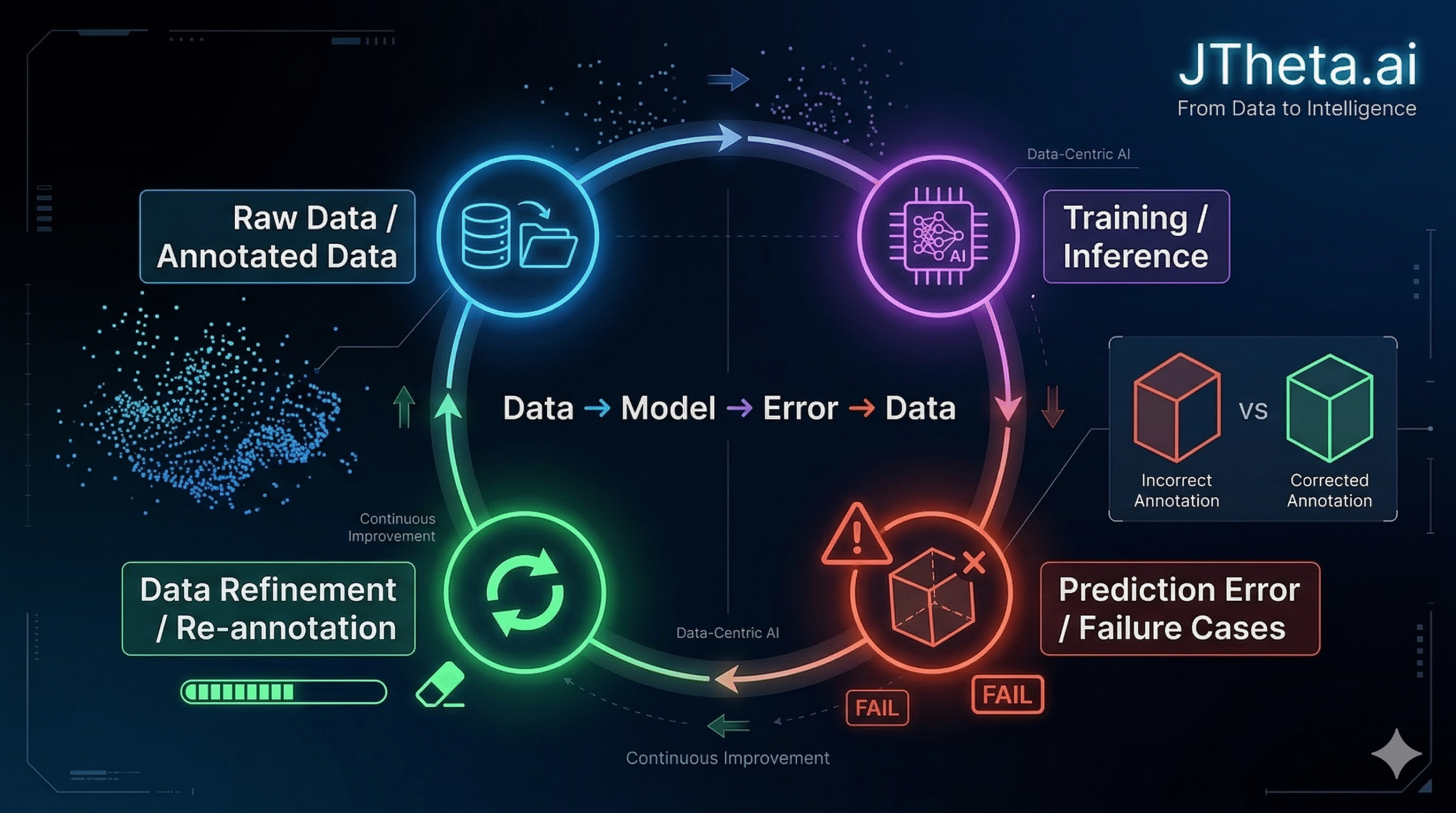
The Bigger Problem: Annotation ≠ Understanding
Here’s where most pipelines fail:
They treat annotation as a task to complete.
But in reality:
Annotation is a translation layer between reality and machine perception
If that translation is flawed:
Models learn incorrect priors
Edge cases remain invisible
Performance improvements plateau
The JTheta.ai Perspective
At JTheta.ai, we don’t just build annotation workflows—
we build data intelligence systems.
Our approach:
Context-aware annotation
→ Understanding object behavior, not just shapeGeometric & statistical validation
→ Ensuring consistency across datasetsClosed-loop learning
Because:
Better models don’t come from more data.
They come from better-understood data.
🔗 Explore JTheta.ai
🚀 Book a Demo:
https://www.jtheta.ai/book-a-demo/
💬 Join Our Discord Community (LiDAR & Perception Discussions): https://discord.com/invite/8RHFFpzZvA
🌐 About JTheta.ai
Building intelligent perception workflows, where data is not just labeled, but truly understood.