Why Physical AI Is Harder Than Digital AI And What Most Robotics Companies Get Wrong
Discover why physical AI is harder than digital AI and how weak data infrastructure causes robotics deployment failures. Learn what high-maturity teams do differently.
What Is Physical AI?
Physical AI refers to artificial intelligence systems that interact with and act within the real world through robotics, autonomous systems, and sensor-driven machines.
Unlike digital AI — which operates in structured software environments — physical AI must interpret dynamic physical environments in real time using sensor fusion, perception systems, and actuation pipelines.
Examples of physical AI systems include:
Autonomous vehicles
Warehouse robotics
Agricultural robotics
Industrial inspection robots
Defense and surveillance systems
The core distinction is this:
Digital AI processes data.
Physical AI must interpret space and act safely within it.
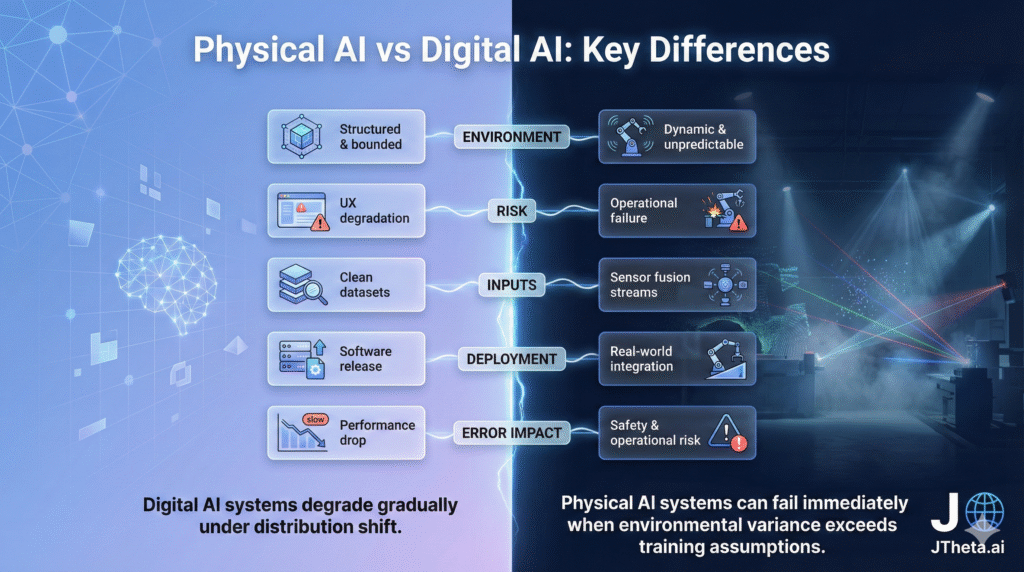
Physical AI vs Digital AI: Key Differences
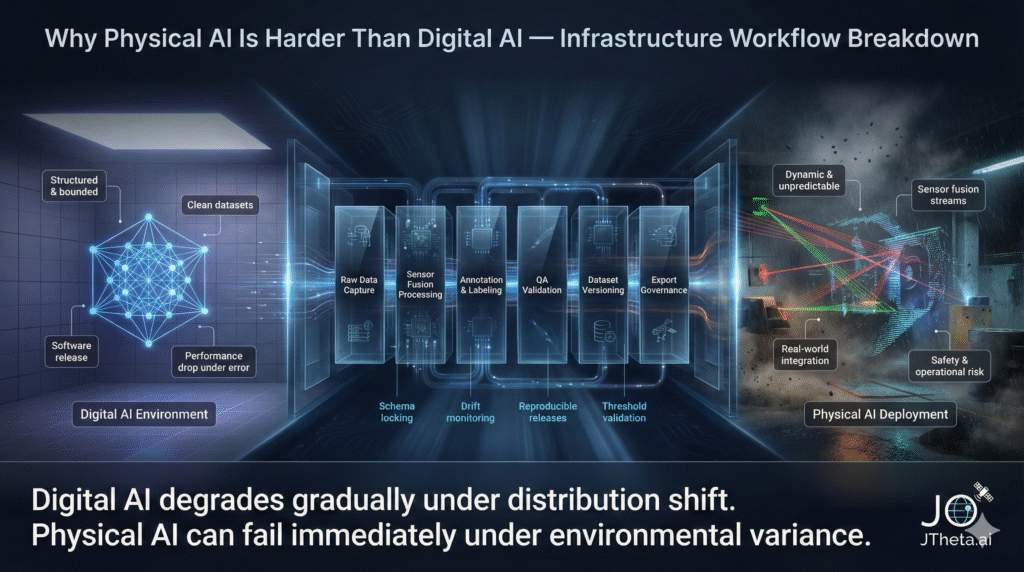
Digital AI systems degrade gradually under distribution shift.
Physical AI systems can fail immediately when environmental variance exceeds training assumptions.
Why Physical AI Is Harder Than Digital AI
1. Unbounded Environments
Digital AI operates on structured datasets — text, images, transactions.
Physical AI operates in:
Changing lighting conditions
Weather interference
Occlusions
Surface reflections
Mechanical vibration
The real world is not version-controlled.
2. Sensor Fusion Complexity
Robotics AI depends on multiple modalities:
LiDAR (depth mapping)
Camera (classification & segmentation)
Radar (velocity detection)
IMU (motion compensation)
Each sensor introduces noise and calibration risk.
Misalignment across modalities compounds perception errors — impacting object detection, obstacle tracking, and spatial reasoning.
👉 Learn more: https://www.jtheta.ai/geospatial-satellite-imaging/
3. Real-Time Actuation Risk
Digital AI produces recommendations. Physical AI produces actions. A model error in digital AI may reduce engagement metrics.
A perception error in robotics can:
Trigger emergency stops
Cause navigation instability
Halt production environments
This amplifies the cost of minor inaccuracies.
4. Annotation Precision in 3D Systems
3D perception systems rely heavily on:
LiDAR data annotation
3D bounding box alignment
Semantic segmentation consistency
Spatial labeling accuracy
Even minor annotation inconsistencies create cascading training instability.
Without structured QA and schema governance, model reproducibility degrades.
👉 Related Reading:
https://www.jtheta.ai/3d-point-cloud-lidar-automation-platform/
The Hidden Problem: Weak Robotics Data Infrastructure
Most robotics companies focus on:
Model architecture
Simulation environments
Compute optimization
Few prioritize:
Dataset version control
Annotation schema locking
QA thresholds
Export governance
Metadata validation
This leads to:
Dataset drift
Irreproducible experiments
Silent performance degradation
Deployment instability
Robotics AI failures often originate in the data layer — not the neural network.
Simulation vs Real-World Deployment
Simulation accelerates iteration.
However, synthetic environments rarely replicate:
Sensor vibration noise
Environmental dust
Reflective surfaces
Rain and fog interference
Teams that rely heavily on simulation without real-world data validation encounter deployment gaps.
High-performing robotics organizations treat simulation as augmentation — not replacement.
What High-Maturity Robotics Teams Do Differently
Successful physical AI teams implement:
1.Dataset Versioning
Every training cycle references a frozen, reproducible dataset release.
2. Annotation Governance
Taxonomy is locked before scaling operations.
3. Structured QA Thresholds
Annotation validation is metric-based, not subjective.
4. Export Validation Pipelines
No ad-hoc dataset handoffs.
5. Drift Monitoring
Environmental variance is continuously tracked.
👉 Explore:
https://www.jtheta.ai/advanced-analytics-dashboards/ https://www.jtheta.ai/lidar-annotation-3d-perception-platform/
Why Small Data Errors Cause Large Robotics Failures
In digital AI, a 2% error might reduce CTR.
In robotics AI, a 2% spatial misalignment can:
Misjudge obstacle distance
Disrupt path planning
Trigger unnecessary system overrides
Physical AI amplifies error because:
Decisions are spatial
Outputs are actuated
Feedback loops are immediate
Infrastructure maturity determines tolerance margin.
How to Evaluate Your Robotics AI Infrastructure
Ask:
Are datasets version-controlled?
Is annotation taxonomy documented?
Are QA thresholds measurable?
Is export reproducible?
Can experiments be traced to specific dataset versions?
If not, your physical AI system may be structurally fragile.
Book a Demo: Evaluate Your AI Data Infrastructure
If your robotics system depends on:
High-precision LiDAR annotation
Structured dataset lifecycle management
Reproducible training workflows
Scalable QA frameworks
It may be time to assess infrastructure maturity.
👉 Book a Demo:
https://jtheta.ai/book-a-demo