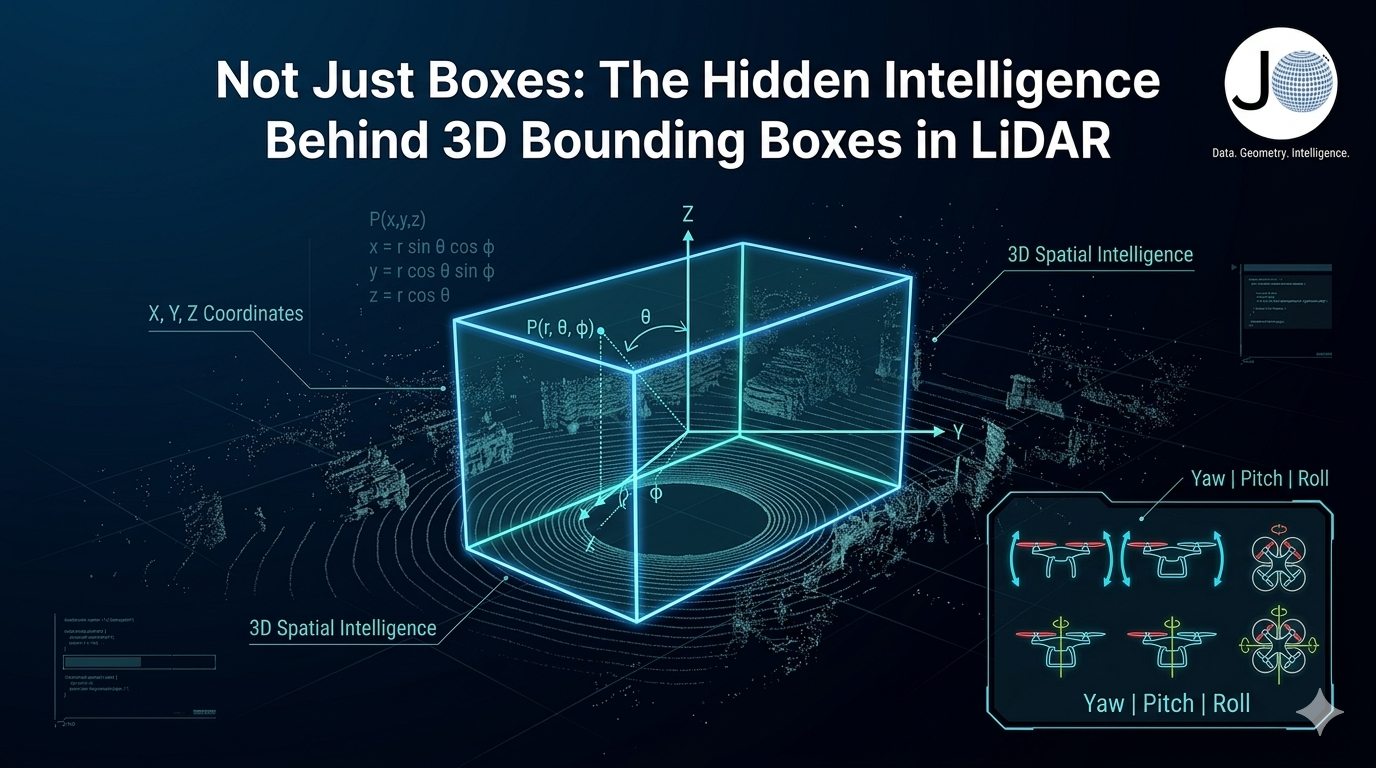
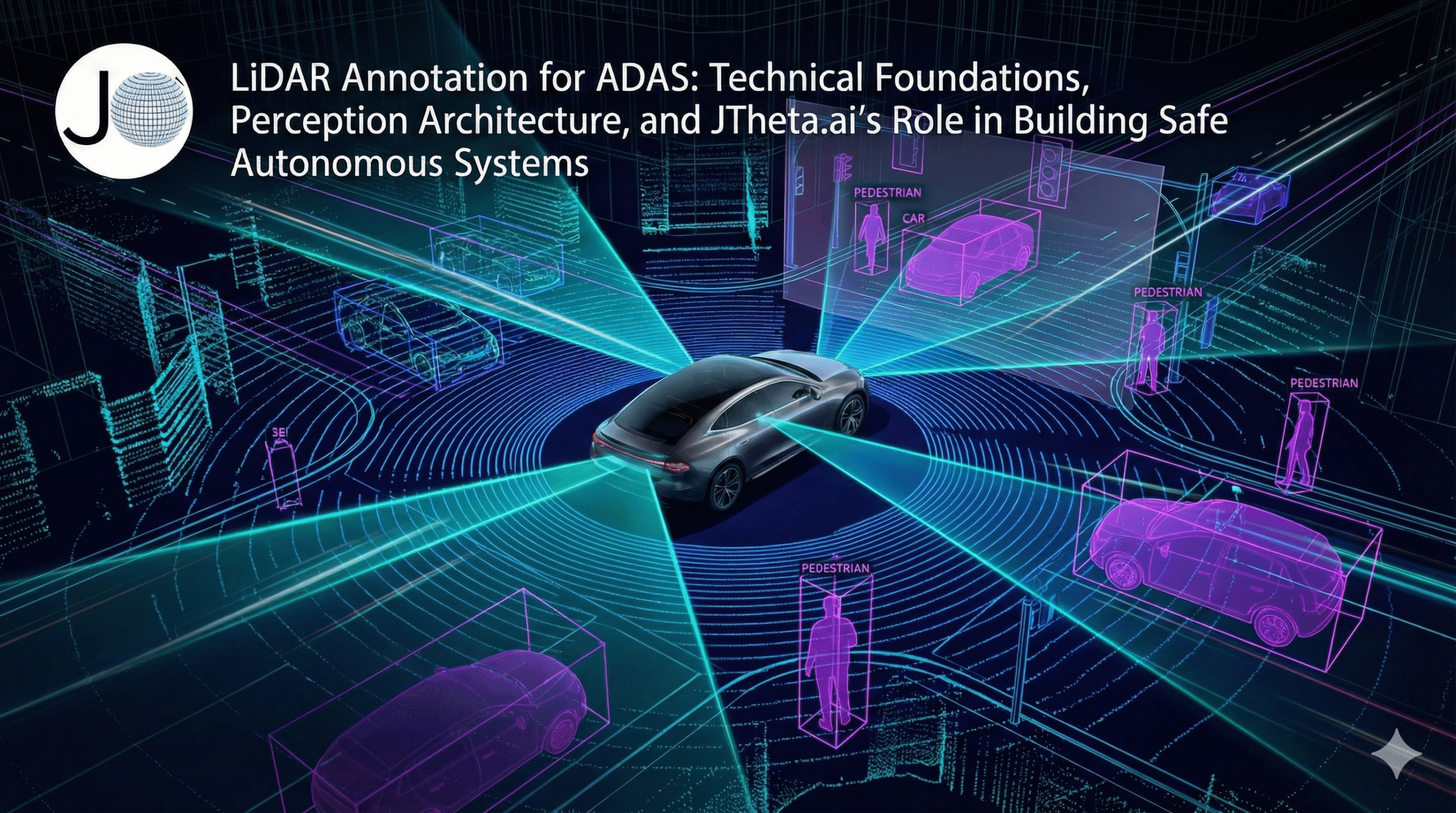
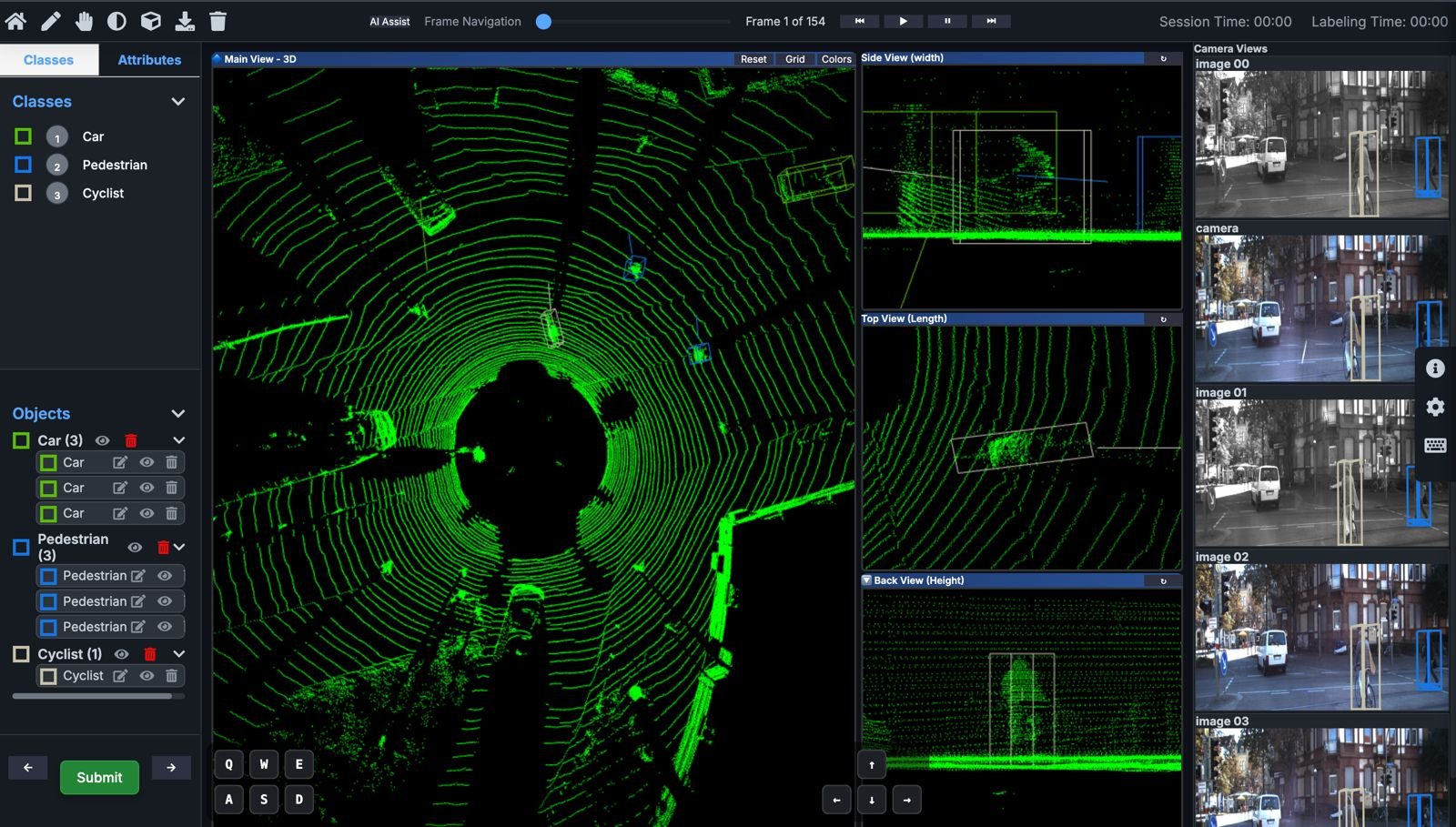
“A self-driving car doesn’t see with its eyes — it sees with data. And when that data is mislabeled, perception collapses.” In the world of autonomous vehicles (AVs) and advanced driver-assistance systems (ADAS), LiDAR isn’t just another sensor — it’s the foundation of 3D perception. Yet, labeling LiDAR data remains one of the hardest, slowest, and most error-prone tasks in the AI pipeline. At JTheta.ai, we set out to fix that. The Problem: Why LiDAR Annotation Is Broken LiDAR (Light Detection and Ranging) captures the world in 3D point clouds — millions of points per frame. Unlike 2D images, these datasets contain depth, distance, and geometry, giving machines a true spatial understanding. But labeling this data accurately is far from simple. The challenges stack up quickly: Manual labeling across dense 3D scenes takes hours per frame. Slow interfaces choke on large point clouds. Bounding box tools lack true 3D context. Messy exports break downstream training pipelines. Annotation drift (across frames) kills model accuracy. In short — annotation inefficiency is holding back AV progress. The Modality: Understanding 3D Point Clouds LiDAR data is fundamentally different from image or video data: 3D Cuboids instead of 2D boxes: Each labeled object must fit precisely in three axes (X, Y, Z). Temporal consistency: Vehicles, pedestrians, and objects move — labels must track them across time. Sensor fusion alignment: LiDAR must synchronize with camera, radar, or GPS data. Massive file sizes: Point cloud frames can reach hundreds of MBs, demanding high-performance infrastructure. That’s why annotation tools built for 2D imagery fail here — they lack spatial intelligence and scalability. How JTheta.ai Fixes It At JTheta.ai, we built a LiDAR-first annotation platform that blends human precision with AI speed — purpose-built for mobility and perception teams. Here’s how: 🧩 1. 3D Cuboid Annotation Draw, rotate, and align 3D cuboids seamlessly inside dense point clouds. Our intuitive 3D editor supports multi-view perspective and precise depth alignment — letting annotators label faster without compromising accuracy. ⚡ 2. Interpolation & Frame Linking No need to label every frame manually. JTheta.ai’s interpolation engine automatically propagates annotations across sequences, maintaining identity consistency and saving up to 60–70% labeling time. 🤖 3. AI-Assist & Auto-Labeling Built-in AI-Assist predicts objects, shapes, and trajectories before humans intervene.Annotators validate or refine — not start from scratch. This human-in-the-loop approach improves both speed and dataset quality. ☁️ 4. Scalable Cloud Infrastructure Our cloud-native platform is optimized for massive LiDAR datasets — from city-scale AV recordings to robotics perception logs. Teams can collaborate, review, and manage projects in real time with version control and automated QA checks. 🔄 5. Seamless Export & Integration Export your annotations in industry-standard formats — COCO, KITTI, or custom LiDAR-compatible schemas — directly into ML pipelines. No broken metadata. No reformatting headaches. 🧭 The Result: Speed Meets Accuracy By combining AI-assisted labeling, 3D-native design, and scalable performance, JTheta.ai helps ADAS and AV teams: Reduce annotation time by up to 70% Improve consistency and accuracy across frames Build richer datasets for object detection, motion prediction, and segmentation Whether it’s detecting a pedestrian at night or mapping a city block in motion — JTheta.ai ensures your LiDAR perception data is clean, fast, and future-ready. Why It Matters Every autonomous vehicle depends on a model that truly understands the 3D world. But that model is only as good as the data it learns from. By fixing LiDAR annotation, we’re not just accelerating labeling — we’re accelerating the future of mobility. (Add images/video) 🧭 Try JTheta.ai LiDAR MVP → www.jtheta.ai/lidar-mvp